页次:1/373页 共7454篇 20篇/页 |
|||||||||||||||||||||||||||||||||||||||||||||||||||
 新闻博览
新闻博览 
 | |
浏览工具:    返回上一页 发布人:patent
我要发布信息 返回上一页 发布人:patent
我要发布信息 | |
| 大学生发明“轮腿机器人”适用排险侦查多领域(图) | 2011/11/24 |
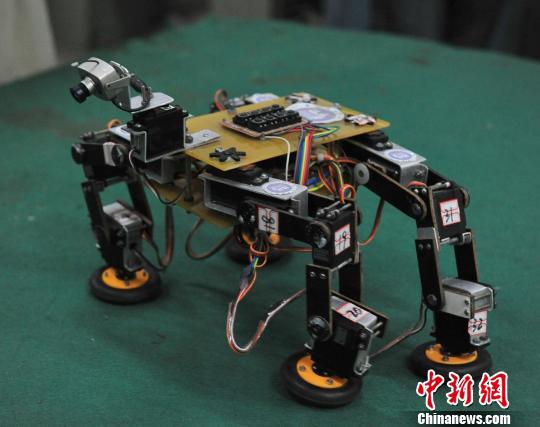 | |
| 中新网洛阳11月23日电(胡影)近日,河南科技大学车辆与动力工程学院的3名大学生耗时4个月发明的“轮腿机器人”,以独特的创意获得了国家知识产权局专利局颁发的实用新型专利。据了解,该机器人不但可以用于救灾排险,还可用在军事侦察等领域。 谈起发明“轮腿机器人”的初衷,发明者之一闫静辉说:“2008年发生的汶川地震让我记忆犹新,强震过后,地面往往成为一片废墟,复杂的地形,给救援行动和物资运送带来很大不便。如何能确保快速输送救援物资这一点是非常重要的,所以我和同学就在思索一定要制作一部腿部多功能的机器人,不但可以用于救灾排险,还可用在军事侦察、防爆反恐等领域。” 有了这个想法后,闫静辉联系了两个志同道合的师弟成立了一个研发小组,开始研发机器人。从设计模型、编写程序、到机器调试都有专人负责。他们白天上课,课余时间全部呆在创新制作室修改模型和调试程序,每天脑子里就是想着如何让机器人能够运作。经过四个月的不懈努力,终于成功制作“轮腿机器人”。 “我们这个跟传统机器人的区别就是,它把轮式机器人和腿式机器人集中于一体,既能像车一样在高速路面上向前行,还可以在遇到障碍物的时候,可以切换腿式机器人,像动物一样向前爬,越障功能比较强。我们还在机器人的头部安装了一个360度旋转的无线摄像头,图像可以通过摄像头传回电脑,然后人工再对机器人进行远程遥控,可实现在废墟上进行灵活搜救、侦察等功能。”参与制作的杨乐峰告诉记者。 闫静辉说,虽然目前还只是一个机械模型,但现在经过反复的调试,机器人的搜救功能已基本具备。下一步他们希望能够进一步完善“轮腿机器人”的腿部结构,使它能够不再依赖遥控器的控制,从而更稳定、更加智能化。(完) | |


